Control automático y supervisión remota de un biorreactor Stirred Tank
Automatic Control and Remote Supervision of a Stirred
Tank Bioreactor
s
Fernando Hernández[1], Carlos Cigliutti[2], André Fonseca[3]
Recibido: Febrero 2020 Aceptado:
Noviembre 2019
Resumen.- El diseño
cuidadoso de un sistema de biorreactor regulado, eficiente, escalable y
portátil para el análisis de una variedad cada vez mayor de procesos biológicos
y químicos es actualmente de suma importancia para el desarrollo de la
Biotecnología. La interacción mutua existente de las variables involucradas
dificulta la optimización del sistema e insta a la necesidad de integrarlo con
un alto rendimiento y adaptabilidad contra los cambios en respuesta a
diferentes características. En el documento se propone un método validado para
la regulación de la velocidad de agitación y temperatura del biorreactor, así
como el pH del compuesto mediante técnicas tradicionales basadas en ON-OFF,
integradores, derivadores y controles Fuzzy. El sistema resultante permite su
configuración y supervisión ya sea local o remotamente con encriptación,
gestionando apropiadamente el contenido almacenado e intercambiado entre
dispositivos.
Palabras clave: Biorreactor; Bioproceso; Sistema de Control; Adaptabilidad;
Mantenibilidad
Summary.- The careful design of a regulated, efficient, scalable
and portable bioreactor system for the analysis of an ever-growing variety of
biological and chemical processes is currently of paramount importance for the
development of Biotechnology. The existing mutual interaction of the variables
involved hinders the optimization of the system and urges the need to embed it
with high performance and adaptability against changes in response to different
characteristics. In this paper is proposed a validated method for the
regulation of the bioreactor’s agitation speed and temperature as well as
compound pH by traditional techniques based on ON-OFF, integrators, derivatives
and Fuzzy controls. The resulting control system enables its configuration and
supervision either locally or remotely with encryption, managing the content
stored and exchanged between devices.
Keywords: Bioreactor; Bioprocess; Control System; Adaptability;
Maintainability
1. Introduction.- Bioreactors are the main units
of operation for the industrial biochemical transformation in which the treated
materials promote biological transformation by the action of living cells or by
cellular components such as enzymes [1]. They consist of standard systems in
either size and functionality composed of a complex set of pipes, fittings,
cables, sensors and actuators where the fermentation process and all its
consequent biological reactions are carried out, causing a major design
challenge for individuals of the area who need
to make a prior intensive analysis of the compound to be processed. This
is justified by the differential behavior of each reaction the system ought to
put through, estimating and considering the interactions with substances or
unavoidable elements of the environment that are often unwanted.
With the objective of
optimizing cell growth in order to obtain a reduction in fabrication and
commercialization times, new types of bioreactors technologies are constantly
being developed to continue improving productivity, pursuing the most efficient
expression of the biological properties of usual microorganisms to achieve more
favorable interactions between cells and culture media [2].
This is obligatory sought in a
tightly controlled environment, providing efficient means of mixing, mass
transfer and heat between the different bioprocesses phases with both complex
non-linear and dynamic properties and delicate environment conditions.
The control of a bioreactor takes into account several variables that
influence each other in distinctive degrees, such as the pH of the sample, the
temperature of the compound, the level of dissolved oxygen and the speed of the
agitation. Each variable affects the study compound differently and must therefore
be considered and treated differently. Thus, it is proposed an automatism
composed of multiple controllers that allow to regulate and modify the
aforementioned relevant variables of the system.
The desired automation is mainly focused on maintaining an acceptable
and stable performance though considering the organisms standard growth
conditions and rapid adaptation of the systems response against unscheduled
changes generated by the environment or the organic reaction itself.
|
|
|
Figure I.- CIM Model of the proposed system design |

As
shown in Figure I, the architecture of the proposed system is centralized in a
master controller located in a Raspberry Pi, on which to develop the main
controllers, user management and auxiliary functions, as well as the web server
for remote supervision. This master controller communicates with slave
controllers consisting of both traditional Arduinos and various devices of
tertiary companies. This chosen design is argued by its simplicity and
coherence, seeking general control focused on a single device that is
responsible for the processing and delegate of data and information. This
decision also facilitates the use, scalability, ordering and maintenance of the
entire system by any operator. In addition, the Raspberry Pi is preferable as a
central component due to its economical advantages and its large amount of
available documentation and libraries that make it extremely versatile and
usable. This arrangement also responds to the decided premise of using a controller
for each control parameter, thus being able to future expansion both in spatial
redundancy and using sensors and/or actuators of other magnitudes.
2. Agitation Velocity Control.- The
decided first magnitude to control is the system rotation speed with which to
agitate, being of utmost importance in all bioprocesses in order to achieve a
complete mixture of the components and
adequate aeration of the cells of the study compound, mandatory when using
aerobic organisms [3]. Oxygen requirements generally depend on the energy of
the processes steps leading to the product and, because oxygen uptake is linked
to cellular metabolism, oxygen dynamics reflect changes in environmental
conditions. In this respect, the main factors of the design of a bioreactor
that influence agitation are its shape, the number and arrangement of the
blades used, the speed required, the dimensions of the container and the depth
of the poured compound.
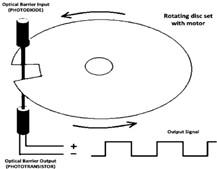
2.1. Agitation
Peripherals.- For the measuring of the speed, it is used a customized system
consisting of rotating a grooved disc attached to the motor shaft represented
in Figure II (a), justified by expensive design alternatives concerning the
adaptation of the encoder. The sensing of the actual agitation speed of the
motor is made by timing each 100µs for native interruptions of the Arduino and
collecting the counter as long as the hole in the slotted disk is not detected.
Once the groove is detected, the calculation is carried out to calculate the
speed at which the disk is fixed to the shaft and therefore the rotation of the
motor. As displayed in Table I, this method achieves in measuring
asynchronously the rotation speed of the blades, getting a heterogeneous error
in the working range. This also involves that the first round of the disk must
necessarily be discarded in order to continue with the magnitudes correct
measurements.
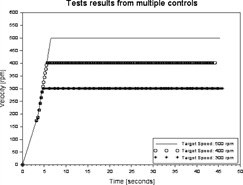
Having
considered several possible actuators such as universal motors and analog
overhead stirrers with DC motors, it remained preferable to use an industrial
induction motor with distinguishing characteristics like availability for high
torque and flexibility in times of use, enabling its continuous operation for
consecutive days. This 6 poles triphasic engine has its speed regulated by the
setup of an attached Variable Frequency Drive (VFD) with multiple internal
registers to configure remotely using Modbus RTU. While testing its performance
it is on one hand observed the precision reached is not entirely acceptable for
accurate usage, keeping a variable error throughout the working range which normally
increments when in lower velocities as presented in Table II. On the other
hand, after an average delay of 1 second as viewed in Figure II (b), the steady
state is reached quickly in critically damped mode, avoiding over-demands to
the system.
|
||||||||||||||||||||||||||||
|
Table I.- Analysis of the relative error in the speed Measurements |
||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||
|
Table II.- Agitation Subsystem Study: Open Loop Behavior |
||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||
|
Figure
II.- Survey results of peripherals characteristics |

2.2. Velocity Control Description.- Analyzing the
habitual behavior of the rotation speed of the induction motor in front of
different inputs, it is possible to carry out the development of a control
system with the logic shown in Figure III, in order to optimize the response
and precision found in open loop.
|
|
|
Figure III.- Block diagram of proposed
Agitation velocity control |
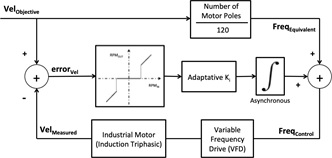
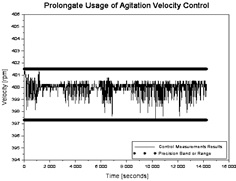
It is therefore proposed to
use an adapted integrative control that allows an integrating parameter
variation depending on the objective values and consequent steps to be made.
This process of adaptation or tuning of the parameters of the integrator is carried
out experimentally and in a multitude of compounds of varied viscosity.
Likewise, a deadband of 1.0 rpm is used with respect to the objective due to
the VFD precision, simultaneously seeking to avoid a permanent oscillation of
the input variable to the system, achieving an acceptable precision and
obtaining the results displayed in Figure IV and Table III.
|
||||||||||||||||||||||||||||||||
|
Table III.- Agitation subsystem study: closed loop observations
|
3. Temperature Control.-
This second magnitude studied is mainly determinant in
the speed or rate of the cell growth process, existing for different
microorganisms and each stage of the fermentation a known optimum temperature
range, found by the scientific community experimentally [4]. In the treated
processes, in case of maintaining the temperature of the organism constant
throughout the fermentation, it would not be necessary to implement any
feedback control, since it would be enough to determine its optimum value.
However, in practice there are multiple internal biochemical reactions which
are system and compound specific and can cause abrupt and arbitrary temperature
changes that are difficult to predict accurately.
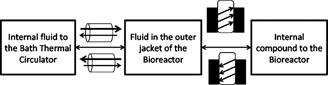
3.1. Thermal Behavior Analysis.- The defined
temperature control subsystem consists of a duly protected RTD Pt100 sensor with OneWire interaction and 0.05◦C precision as well as an external bath
circulator with same internal
sensor type and consequent Fuzzy control of inner fluid. The heat transfer
to the study compound occurs through an outer jacket of stainless steel that is
connected to the circulator by means of aluminum-coated pipes capable of withstanding the 90◦C required
particularly for the system pasteurization
and sterilization. This lays the path to several
bidirectional interactions that affect the system thermal response such as energetic losses by
contact, notorious initial delay response and thermal inertia, as represented
in Figure V.
|
|
|
Figure
V.- Interaction between fundamental components of temperature control |
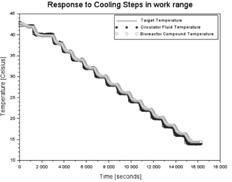
It
is then evaluated the most usual steps in the fermentations worked. These
sections consisted of 18◦C
to 25◦C
intervals (of main relevance
for fungal experiments) and 18◦C to 37◦C
(important range for working with bacteria). These experiences had thus
to be studied carefully by sections and in both
directions (increasing and decreasing the temperature as shown
in Figure VI) in order to observe the greatest number of cases and
behaviors against the same environmental variables.
|
||||||||||||||||||||||||
|
Table IV.- Study by temperature ranges of the compounds steady state |
Once analyzed throughout the 5◦C to
95◦C range,
it is observed that the bioreactor
temperature steady state value does
not necessarily reach every time the actuator setting point as displayed in Table IV, arriving at the thermal equilibrium at
the value collected in the container considering the losses and filtrations inherently existing. These
differences are more notorious the
greater the set target, existing sparse discrepancies
at low values. With regard to transient time, no such variation is found in the work range
considered, with an average time of
400 seconds in 2◦C
to 10◦C
steps and with subtle longer duration in initial steps when heating or cooling.
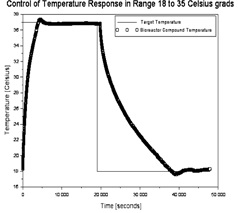
3.2. Temperature
Control Explanation.- At the moment of designing the temperature control
logic, and considering satisfactory the response characteristics observed when
acting the circulator Fuzzy control, it is proposed to perfection its influence
on the general system.
As
shown in Figure VII, the control system design is based on integrators and
derivatives developed in floating control mode in a neighborhood of 3.0◦C and a deadband of 0.2◦C
in order to avoid unnecessary thermal circulator over-use and prevent often visualized permanent
oscillation of the response by temperature.
Outside this interval, the own circulator control
is used in its usual mode. This limitation is found to be
motivated by the desire to evade as much as possible periodic modifications to
the actuator behavior, in order to reduce the probabilities of failures both in
communication and in the equipment
nominal operation. In the same way, the
floating control is simultaneously limited by time as soon as a more frequent and excessive action is
detected when approaching the configured target value. This restraint is
defined in 90 seconds, therefore the conditions must be fulfilled in both time and temperature to allow a
change in the action on the actuator.
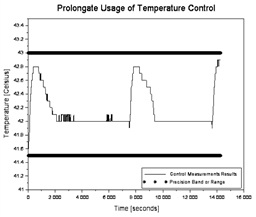
This adaptation and selection of parameters achieved
throughout the usual work range work is benefited by the slowness of the observed behavior as
displayed in Figure VIII, which helps dealing with occasional random factors.
|
|
||||
|
Figure VI.- Results example of the system
thermal experiences |
||||
|
|
|||||
|
Figure VII.- Block diagram of proposed temperature
control |
|||||


|
||||
|
Figure VIII.-
Application and testing of proposed temperature control |
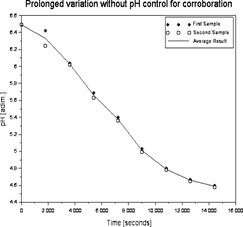
4. Compound pH control.- The
pH in bioprocesses has arbitrary variations both in time and proportion
consequences of predominant chemical reactions that alter the general
conditions of the system, of close relationship with the variations in
temperature of the compound [5]. In order to mitigate abrupt changes in pH and
as a secondary measure, it is common to use buffer components, in order to
maintain the level of acidity or alkalinity
of a substance exposed to chemical reactions, trying to avoid generating
unwanted reactions. This use of conjugates is
what gives these solutions their characteristic resistance to changes
in pH, since it creates
a balance between
acid and base that
is difficult to overcome by other acids or bases. However, when these changes in pH exceed the known capacity of the buffer,
the break occurs, after which the pH will vary radically as if no auxiliary
solution is used.
4.1. Ph Response Examination.- For
the performance of the pH Control it is used two peristaltic pumps controlled
by PWM with corroborated 68µL per drops of acid or base and
an electrode sensor of 0.002 value precision interacted with I2C, capable of
validated with standing temperatures
from 0◦C to
50◦C. So as not to use high resources volumes unnecessarily,
it is proposed a system scaling which delegate equivalent results in consequence of the relative
correlation of substances behaviors to be examined in terms of the buffer solutions concentration and the acids and bases
molarities.
|
||||||||||||||||||
|
Table V.- Experimental
characteristics of differentiated zones |
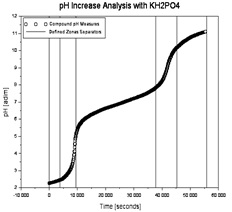
It
is then proceeded to execute sufficient experiments at various intervals in order to have an adequate knowledge of the system characteristics in terms of
their behavior against pH variations, using mainly 1 M solutions
of phosphate buffer (KH2PO4),
sodium acetate (C2H3NaO2),
lacteal medium and proprietary blends with yeasts. According to these experiences,
the existence of several markedly different sensitive areas is appreciated as shown in Figure IX and Table V,
favored by the actuators immediate action on the pH, making it
impossible to collect intermediate values between two contiguous points.
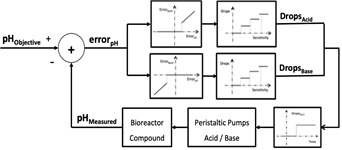
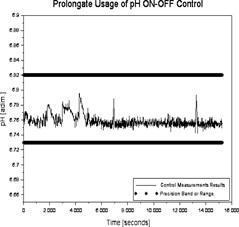
4.2. ON-OFF control Applications.- Based
on the results of previous experiences, an ON-OFF control is proposed, deciding the action according to the current pH error sign and system sensitivity
as represented in Figure X.
Consequently, it is determined the number of drops
necessary to maintain the pH value in a neighborhood of acceptable precision, estimated based on the defined area in which the compound is located at the
measuring moment. It is preferred at
all times the use of the minimum necessary amount of acid and base to prevent
quickly emptying the recipients
carrying the aforementioned performers, while cautioning
avoid oscillations. Then, a 0.05 deadband is used and a minimum time between expulsions of 6 seconds. This leads to
satisfactory results shown in Table VI and Figure XI.
In
order to enable a user customization on the control and provide tools to
increase the flow or speed of the droplet ejection, the actuator is designed to
allow variation of interval and number of drops per burst.
|
||||
|
Figure. IX.- Results of continuous evolution
of pH values in work range |
||||
|
|
||||
|
Figure X.- Block diagram
of proposed pH ON-OFF control |

|
||||||||||||||||||
|
Table VI,- Distinction in zones made by pH control
in ON-OFF mode |
|
||||
|
Figure. XI.- Application and testing of proposed pH
ON-OFF control in lacteal medium with bacteria Streptococcus thermophilus |
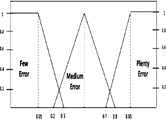
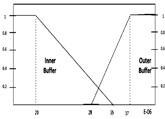
4.3. Fuzzy Control Application.- Alternatively, the
use of Fuzzy control is proposed, which allows
to obtain a definitive conclusion based on vague, ambiguous, imprecise, noisy, inaccessible or unable to mathematically model information, causing
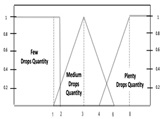
a smooth control output for a wide range of excitations [6]. Thus, three Fuzzy sets are defined: two inputs and one
output, seeking to simplify the design of the control against slight variants
found in the system response. By experimentally defining the three triangular membership functions and if-then
rules shown below, the chosen method for defuzzification is the area centroid.
|
||||||
|
Figure XII.-
Implemented functions of the proposed pH fuzzy control |
(A’∧B2)∨(A0.5∧B’) → C0.5
(A2∧B2)∨(A’∧B’)
→ C’
A2∧B’ →
C2
It is then proceeded to compass the same experiments on the buffer solutions, observing a
sufficiently acceptable resulting behavior but with a target arrival time
greater than the previous ON-OFF control, which refers to
have a more satisfactory adaptability
to noted changes. These considerations relate to
the complexities of general optimization of Fuzzy parameters.
5. Remote Management.-
The
security of the data displayed to the user satisfactorily guarantees the
authenticity and integrity of the information,
using symmetric encryption by AES-256 ciphered by blocks according to CBC with padding PKC#7 and hash authorization according to
HMAC-SHA256, ensuring in turn the correct
compatibility between both ends of the remote and
local server [7]. This protection manages to avoid access by any user to restricted data of the
system (such as information from other users, equipment reservations,
fermentation, system status, histories) and that they
can only be viewed, used and edited
through the interfaces provided in the system, by those users who are authenticated and have the authorization for such actions. For this purpose, it is
decided to encrypt and decrypt the
sensitive content once closed and the application started respectively, with backups periodically every hour from the start of the program in case of prolonged use.
The
communication between processes and with the global
program is carried out through shared memory due to its low probability
of access collisions and the impossibility of blockages
due to readings and writings that are not synchronized
between ends. In addition, the slower access of this method of communication is not problematic
as it does not result in extreme
accuracy in the response times and pursuit of data
refreshments on the screen of 10 seconds of interval (for a normal duration
of the 1-week process).
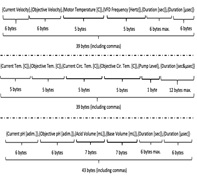
As shown in Figure
XIV, the relevant
information is organized
in system and controls data, with respect to the relevance of the same for the registration and later
visualization of the registered results,
or for the correct functioning of the system.
|
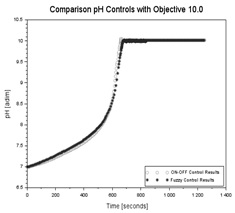
||||
|
Figure XIII.- Comparison between both proposed
alternatives to pH Control |

|
||||||
|
Figure XIV.-
Representation of general system and controls data management |


Both types of data
are therefore treated differently in terms of the protection provided (those
inherent to the overall operation had to be coded and authenticated), being
equally accessible by the instrument operator.
The system sensitive data
makes use of the JSON database format in such a way to simplify its reading by
the remote server and the understanding of the data stored in the local
console, with ease of future expansion. Similarly, the controls general data correspond
to strings of raw numerical values without protection ordered according to a
determined structure that respond to the results obtained from the peripheral
sensors and actuators. This information of the controls allows knowing the characteristics of the current
state of the same and the evolution
of the corresponding parameters of interest of the present fermentation, initializing a new file in each
initialization of the control. For the latter records it is not considered
necessary to use a particular database because of the need for a quick reading
of the information and for the low amount of
data that is normally used.
6. Conclusion.- The proposed
control system successfully achieves in automatically regulate main
bioprocesses parameters like agitation speed, temperature and compound pH. The
former meets a maximum nominal error of approximate 0.8% with superior 0.1%
accuracy, while the temperature reaches an average overdraft of 4.0% and a
maximum steady state error of 2.7%. The latter particular behavior facilitates
the implementation of two possible controls with similar results. Finally, the
globally affordable system design makes place for future possible improvements
and addition of new control parameters.
7. References
[1] M. R. Spier, L. P. de Souza Vandenberghe, A. B. P. Medeiros,
and C. R. Soccol, Application of different
types of bioreactors in bioprocesses. Parana: Univeristy of Parana, Bioprocess
Engineering and Biotechonolgy Department, 2011, pp. 58-69.
[2] J. G.
Akpa, “Modeling of a bioreactor for the fermentation of palmwine by
Saccharomyce cerevisiae (yeast) and lactobacillus (bacteria),” American
Journal of Scientific and Industrial Research, vol. 3, n°4, pp. 231-239,
2012.
[3] Y. Zhou,
L. Han, H. He, B. Sang, D. Yu, J. Feng, and X. Zhang, “Effects of agitation, aeration and temperature on
production of a novel glucoprotein
GP-1 by Streptomyces kanasenisi ZX01 and scale-up based on volumetric oxygen transfer coefficient,” Molecules vol. 23, pp. 1-14, 2018.
[4] R.
Noor, Z. Islam, S. K. Munshi, and F. Rahman,
“Influence of temperature on escherichia coli: growth in different culture media,”
Journal of
Pure and Applied Microbiology, vol. 7, n°2, pp. 899-904, 2013.
[5] P. Sarkar, and G. K. Suraishkumar, “pH
and temperature stresses in bioreactor
cultures: intracellular superoxide levels,”
Industrial & Engineering Chemistry Research, vol. 50, n°23, pp. 13129–13136, 2011.
[6] J. S.
R. Jang, C. T. Sun, and E. Mizutani,
Neuro-fuzzy and soft computing: a computational approach to learning and
machine intelligence. New Jersey: Prentice Hall, 1997, pp. 1-90.
[7] E. S.
I. Harba, “Secure data encryption through a combination of AES, RSA and HMAC,” Engineering, Technology & Applied
Science Research, vol. 17, n°4, pp. 1781-1785,
2017.